|
Srijan Kumar Pal I'm a 1st year Ph.D student in EE at the University of Minnesota, where I work under Prof. Jiarong Hong, as a part of the Flow Field Imaging Lab. Previously I received my Masters in Robotics from University of Minnesota and my Bachelor's degree from Jadavpur University. During my time at UMN, I have also had the opportunity to collaborate with Prof. Maria Gini and Prof. Changhyun Choi. |

|
Research InterestsI'm interested in computer vision, vision-based robot learning, and autonomous control. My research focuses on developing vision-based controllers that enable autonomous systems to perceive, navigate, and interact intelligently in dynamic, unstructured environments. |
|
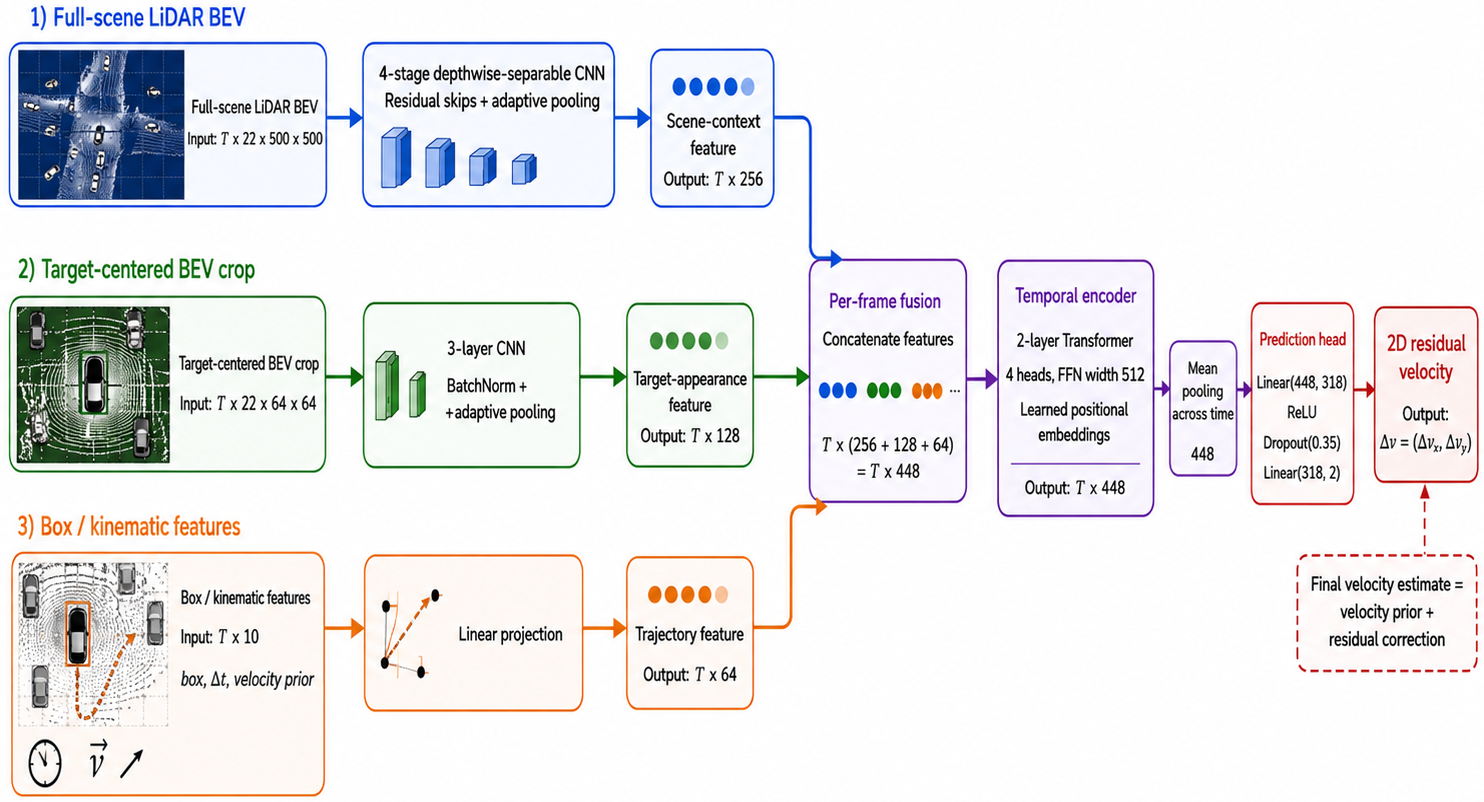
Temporal LiDAR-Camera BEV Fusion for Vehicle Velocity Prediction
Srijan K. Pal, J. Baude, L. Freitas, A. Anand Under the guidance of Prof. Ju Sun during Spring 2026 Deep Learning Course Github / Report A Transformer that refines target-vehicle velocity on nuScenes by fusing LiDAR BEV context, target-centered crops, and box kinematics over T=4 keyframes as a residual correction to a finite-difference prior — achieving 46.1% lower mean vector error than baseline. BEVFormer fine-tuning outperforms its own velocity head (1.11 vs 1.50 m/s). |
|
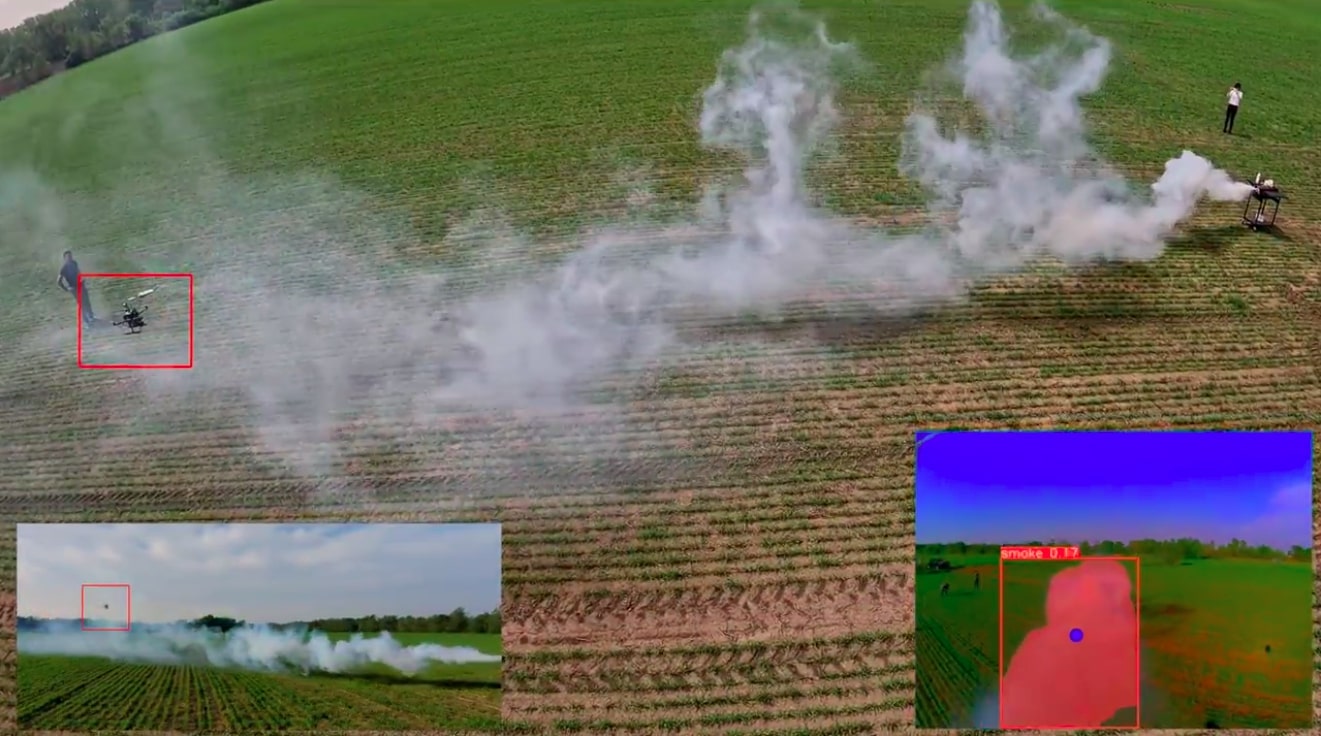
Autonomous Drone for Dynamic Smoke Plume Tracking
Srijan K. Pal, S. Sharma, N. Krishnakumar, J. Hong IEEE International Conference on Robotics and Automation (ICRA), 2025 Project Page / Paper (DOI) / Paper (PDF) / Presentation / Github An autonomous drone controller using a PPO-based DRL framework integrated with segmentation, trained on Unreal Engine, and deployed on Jetson equipped quadcopter, for robust dynamic smoke plume tracking in unsteady winds, improving tracking efficiency (vs PID) by 15%. |
|
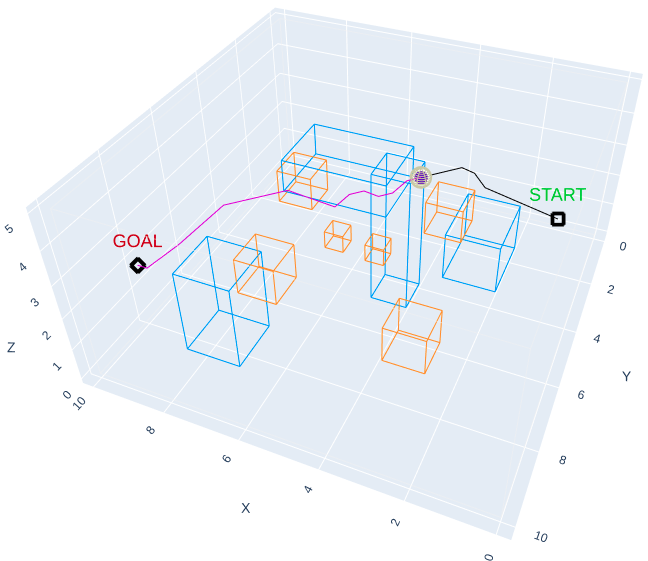
3D Path Planning in Dynamic Environment
Srijan K. Pal Under the guidance of Prof. Andrew Exley during Fall 2025 Artificial Intelligence I Course Github / Report A 3D path-planning framework using offline and online A* with local sensing-based replanning to navigate voxelized environments containing unknown dynamic obstacles, with interactive 3D visualizations and quantitative planning metrics. |


|
Sparsity Focused Super Resolution with Deep Learning
Srijan K. Pal, H. Nair, V. Natamai Under the guidance of Prof. M. Akcakaya during Fall 2025 Image Processing and Applications Course Github / Report A sparsity-aware deep super-resolution model that enforces L1 regularization on selected intermediate feature maps to balance reconstruction fidelity and perceptual quality, outperforming baseline SRCNN and VDSR variants through systematic ablation. |


|
Instant-NGP-based 3D Reconstruction Using Autonomous Drone Imagery
Srijan K. Pal, A. Kumar Under the guidance of Prof. Changhyun Choi during Fall 2024 Robot Vision Course Project Page / Presentation / Github Developed an algorithm for autonomous drone-based image capture in optimal circular paths around the target, and using the sorted sharp image to generate camera trajectories with COLMAP, and feeding them into a modified Instant-NGP (optimized MLP and encoding) for high-fidelity 3D reconstruction. |
|
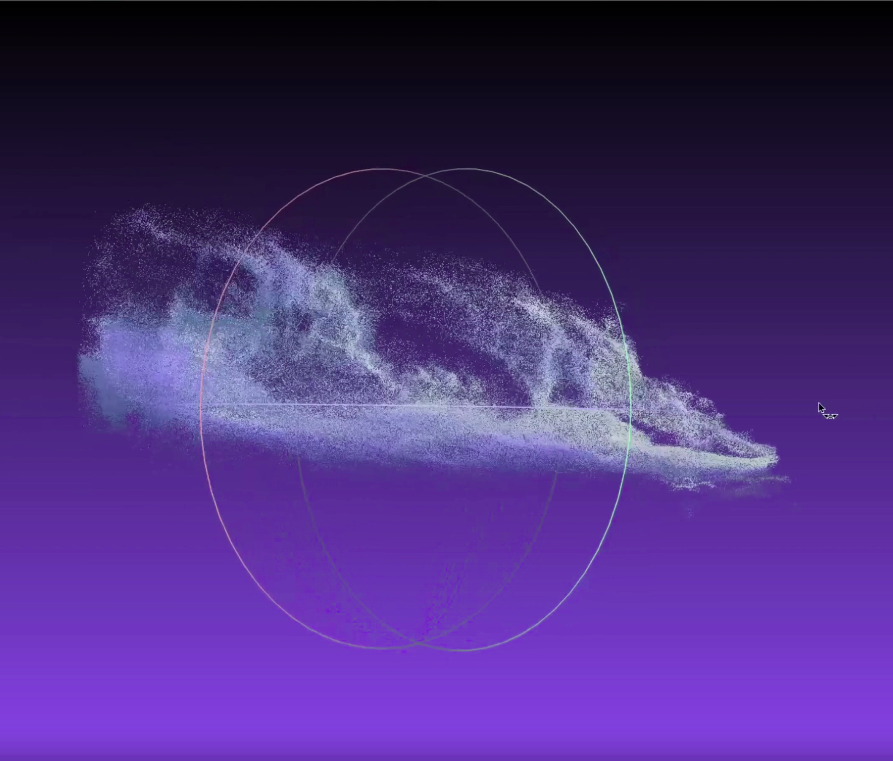
3D Characterization of Smoke Plume Dispersion using Multi-view Drone Swarm
N. Krishnakumar, S. Sharma, Srijan K. Pal, J. Hong Science of The Total Environment, 2025 Paper (DOI) / Paper (PDF) / Video / Presentation Developed a synchronized, autonomous 4-drone swarm for adaptive multi-view imaging, dynamic repositioning, and high-fidelity NeRF-based volumetric 3D reconstructions of evolving smoke plumes at a 1-second temporal resolution. |

|
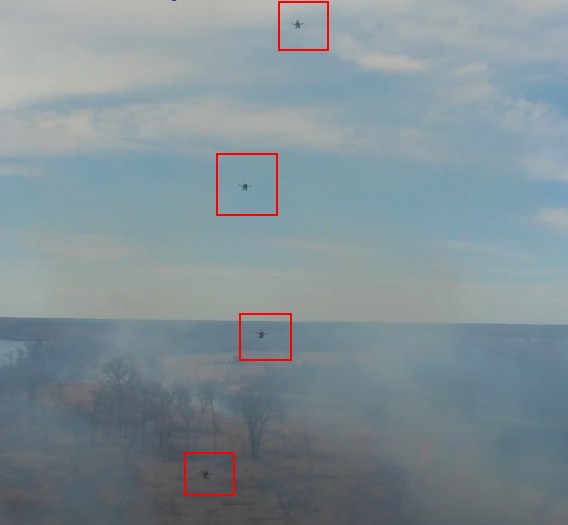
Drone Swarm for Forest Fire Smoke Particle Mapping
S. Sharma, N. Krishnakumar, Srijan K. Pal, J. Hong Graduate Research Assistant at Flow Field Imaging Lab Media Coverage / Video / Presentation (Coming soon!) Deployed a 4-drone swarm with DIH particle sensors in a master-worker architecture and autonomously generate waypoints to map real-time volumetric smoke particle dispersion during a large-scale prescribed forest fire, providing insights into smoke particle morphology and spatial distribution. |
|
Check out my previous website for more robotics projects from my undergrad. |
|
|
Source code available on John Barron's Website. |